|
| enum | camera_format { RGBA,
YUV
} |
| |
|
using | push_frame_cb_t = std::function< void(bnb::full_image_t image)> |
| |
|
|
| camera_base (push_frame_cb_t cb) |
| |
|
virtual void | set_device_by_index (uint32_t index)=0 |
| |
|
virtual void | set_device_by_id (const std::string &device_id)=0 |
| |
|
virtual void | start ()=0 |
| |
|
const std::vector< camera_device_description > | get_connected_devices () const |
| |
|
size_t | get_current_device_index () const |
| |
|
|
static camera_format | current_format = camera_format::RGBA |
| |
|
|
push_frame_cb_t | m_push_frame_cb |
| |
|
std::atomic_bool | m_is_abort_requested |
| |
|
std::vector< camera_device_description > | m_connected_devices |
| |
|
size_t | m_device_index |
| |
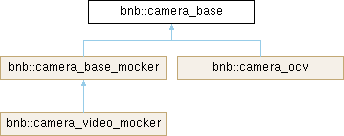
Definition at line 23 of file base.hpp.
The documentation for this class was generated from the following file:
- /opt/banuba_sdk/libs/spal/bnb/spal/camera/base.hpp
 1.8.17
1.8.17